



 |
 |
 |
 |
 |
 |
| ГЛАВНАЯ | ПРЕДИСЛОВИЕ | СОДЕРЖАНИЕ | РАЗДЕЛЫ | СТАТЬИ | КОНТАКТЫ |
Кривохатько Н. И.
УНИВЕРСАЛЬНАЯ ТЕХНОЛОГИЯ ПРОЕКТИРОВАНИЯ
ПРЕДЛОЖЕНИЕ О ПРИКЛАДНОМ ИСПОЛЬЗОВАНИИ
ПРИНЦИПИАЛЬНО НОВОГО СИНТЕТИЧЕСКОГО МЕТОДА НАУЧНОГО ПОЗНАНИЯ
г. Запорожье
ВВЕДЕНИЕ
Содержание предложения составляет разработка
оригинальной САПР. Принципы, на которых базируется эта САПР, отличаются от
общепринятых в следующих моментах.
Типичная САПР работает с формализованной задачей
проектирования. Этому этапу предшествуют другие этапы, в том числе синтез ряда
моделей - математической, функциональной. Как сама концепция объекта
проектирования, так и все промежуточные модели являются продуктом человеческого
мышления, компьютер здесь выполняет лишь вспомогательные функции. Поэтому
оптимизация может осуществляться только в рамках заданной концепции. Но
проектирование могло бы стать гораздо более эффективным, если бы существовала
возможность находить оптимальную структуру проектируемой системы еще на
концептуальном уровне.
Первая существенная особенность предлагаемой
идеи САПР заключается в том, что она должна работать не с формальными моделями
проектируемой системы, но с формализованным описанием преобразования
соответствующего предметного поля, для осуществления которого и предназначается
проектируемая система. В основе этого приема лежит следующая закономерность.
Предполагаемое воздействие проектируемой системы
на предметное поле (целью которого является соответствующее его изменение)
можно рассматривать как взаимодействие изменяющего и изменяемого факторов. И
первый и второй имеют структуру, а между этими структурами должно существовать
вполне определенное соответствие. Отсюда можно сделать вывод, что в структуре
изменяемого объекта (иначе - среде, на которую воздействует изменяющий фактор)
в неявном виде скрыта структура изменяющего объекта (иначе - проектируемой
системы). Оригинальная особенность предлагаемой САПР состоит в том, что из
формального описания планируемых изменений предметного поля она извлекает
структуру (на базе которой синтезирует проект) системы, предназначенной для
осуществления этих изменений.
Предлагаемый подход позволяет решать задачу
оптимизации автоматически и в отношении самой концепции проектируемой системы.
Достигается полная автоматизация на всех этапах проектирования и частичная - на
этапе постановки задачи.
Второй существенной особенностью,
отличающей предлагаемую концепцию САПР является
органическое сочетание универсальности и эффективности. Чтобы обосновать это ее
качество, приведем следующую систему рассуждений.
Типичная САПР определяется как специализированная
система с максимальным использованием унифицированных модулей. Требования
высокой эффективности и универсальности, как правило, противоречивы. Высокой
эффективности САПР, выражаемой прежде всего малыми временными и материальными
затратами при решении проектных задач, добиваются за счет специализации этих
систем. Очевидно, число различных САПР при этом растет. Чтобы снизить расходы
на разработку многих специализированных САПР, их строят на основе максимального
использования унифицированных составных частей. Необходимым условием унификации
считается поиск общих положений в моделировании, анализе и синтезе разнородных
технических объектов.
Таким образом, констатируется, что существующие
САПР специализированы, унификация в них может быть достигнута лишь
относительная. Но главная причина этого - не низкая компетентность
разработчиков САПР. Она гораздо глубже и кроется в самых общих принципах, на
которых базируется все человеческое знание. Эта причина - язык, используемый
для описания различных предметов и явлений действительности, а точнее -
множественность таких языков, изобилующих специальной терминологией. Ведь этот
язык по самой своей сути ориентирован на отражение различий между объектами, он
подчеркивает специальные их свойства, уникальные особенности. Строгий же
формальный язык, способный отражать именно общие, универсальные свойства всех
объектов действительности, наукой пока не представлен.
Но это не означает, что создание подобного языка
невозможно в принципе. В пользу предположения о существовании такой возможности
говорит способность человека решать самые разнородные задачи. Это означает, что
мышление человека все же использует некий универсальный язык.
Синтез
версии языка, обладающего свойством универсальности, был осуществлен автором в
процессе работы над принципиально новым подходом в познании, именуемом СФКМ -
системно-физической концепцией мира. САПР, использующая
этот язык, сможет осуществлять информационный синтез самых разнородных по
природе и масштабах технических объектов. А в перспективе
и объектов, не являющихся техническими.
Очевидно, что в краткой аннотации перечислить
все достоинства предлагаемого подхода невозможно. Следует лишь добавить, что на
его основе можно строить не только САПР, но и системы искусственного
интеллекта, систему, которая сможет осуществлять имитационное моделирование
любых процессов или универсальную экспертную систему.
Информатика (а изготовление САПР относится к
сфере деятельности информатики) является в настоящее время бурно развивающейся
отраслью мировой экономики. Поэтому не вызывает сомнений, что экономичная
высокоэффективная САПР, которая одна сможет осуществлять информационный синтез
самых разнородных объектов, будет иметь спрос.
СУЩНОСТЬ НОВОГО МЕТОДА ПОЗНАНИЯ В ПРИМЕНЕНИИ К
РАССМАТРИВАЕМОЙ ПРОБЛЕМЕ
Таким образом, задача, которую нам предстоит решить, сводится к двум пунктам:
Описать
алгоритм синтеза объекта со свойствами, обусловленными структурой изменений
соответствующего предметного поля (определим его здесь как
изменяемый фактор), которые должен осуществлять данный
объект-преобразователь (который определим как
изменяющий фактор).
Решить эту задачу
с частичным использованием универсального языка описания
действительности. Понятно, что эту задачу – задачу формирования и
обоснования необходимых элементов универсального языка – нам придётся решать в
первую очередь.
Отправной точкой в этом процессе будет
детальный анализ и транскрипция в системно-физический формат таких общих
понятий философии, как взаимодействиеи
изменение.
Понятие
взаимодействия определяется в философии как некая "всеобщая
форма связи тел и явлений, выражающаяся в их взаимном влиянии друг на
друга и изменении. Без взаимодействия невозможно существование
каких-либо материальных объектов, систем. Оно связывает воедино их элементы,
определяет их состав, структурную организацию и происходящие в них изменения. В
современной физике взаимодействие понимается как передача вещества, энергии и
информации из одной материальной системы в другую. Этот процесс осуществляется
с помощью физических полей, причём скорость распространения взаимодействия не
может быть бесконечной. До недавнего времени считалось, что она не может
превысить скорости распространения света в вакууме, однако сейчас широко
обсуждается вопрос о возможности сверхсветовых скоростей передачи
взаимодействия".
Изменение же здесь суть "
результат взаимодействия предметов, их различных сторон.
Изменение носит объективный и всеобщий характер. В процессе изменения иным
может стать качество предмета, его количество,
структура, функция и т. д.".
Наша задача сводится к тому, чтобы
перевести эти определения на системно-физический язык. Нам же для решения нашей
задачи необходимо сформулировать понятия идеального
и системного пространства.
Только в рамках решения этой задачи
становится возможным раскрыть содержание (обнажить структуру) процесса
взаимодействия изменяемого
(предметного поля) и изменяющего (конструируемого
объекта-преобразователя) факторов,
сделать его наглядным, видимым, а также построить формальное, обеспечивающее
машинную реализацию описание этого процесса.
Во всех (по крайней мере, в большинстве)
инженерных разработок применяется евклидова геометрия,
инженерные сооружения конструируются с учётом свойств евклидова пространства.
Евклидова математика позволяет достаточно точно рассчитывать
такие объекты и реализовывать алгоритмы их созидания. Но строгое проектирование
более сложного комплекса, состоящего из систем различной природы (например,
комплекса "человек-машина", в котором учитывались бы информационные
потоки высшего порядка – психология, мышление) в евклидовом пространстве
попросту невозможно. Между тем эта задача вполне разрешима, если использовать
такой методологический инструмент, как системное
пространство. Построение универсального метода проектирования возможно лишь
с использованием системного пространства.
Но, чтобы перейти от евклидова пространства к системному,
необходимо прежде рассмотреть понятия идеального
пространства и идеальной системы.
ПОРОЖДЕНИЕ ИДЕАЛЬНОЙ СИСТЕМЫ
Для решения этой задачи (задачи построения идеального
пространства и идеальной системы)
нам придётся прибегнуть к приёму, который используется, например, в
молекулярной физике, где рассматривается такое понятие, как “идеальный газ”.
Этот приём – идеализация реальных объектов (и процессов) оказался очень
плодотворным, с его помощью стало возможным легко и наглядно описывать свойства
газов. То же самое нам придётся проделать в отношении таких объектов, как
пространство и система.
Понятие
пространства является одним из самых глубоких в философии и познании.
Существуют разные взгляды на природу пространства. В одном случае пространство
рассматривается как некое вместилище, ёмкость, в другом – как некая структура (реляционная
и субстанциональная концепции пространства и времени). СФКМ исходит из предположения
о существовании структуры у физического вакуума, поэтому здесь пространство –
это структура, которая является
одновременно и местом, где зарождаются и развиваются различные явления (которые
мы воспринимаем как тела и процессы) и источником энергии для них и
организующим фактором их формы. Но любой объект действительности обладает тем
или иным набором свойств, признаков и даже у элементарных частиц этот набор не
маленький. При построении идеального пространства используются лишь самые общие
из них. Каковы эти свойства и признаки? Приведём цитату.
"В своей деятельности мы
обнаруживаем такие особенности структурной организации мира, что части и
элементы, из которых построены материальные объекты, определённым образом
расположены друг относительно друга, образуют некоторые устойчивые
конфигурации, что задаёт границы объекта по отношению к окружающей среде. Можно
сказать, что каждый объект характеризуется своеобразной "упаковкой"
входящих в него элементов, их расположенностью относительно друг друга, и это
делает любые объекты протяженными. Кроме того, каждый объект занимает какое-то
место среди других объектов, граничит с ними.
Все эти предельно общие свойства,
выражающие структурную организацию материального мира, -
свойства объектов быть протяженными, занимать место среди других,
граничить с другими объектами – выступают как первые, наиболее общие
характеристики пространства. Если их абстрагировать из
действительности, отделить от самих материальных объектов, то мы получим
представление о пространстве, как таковом".
Из сказанного вытекает, что пространство
можно "обнаружить" лишь через структуру объекта, помещённого в это
пространство. Если из пространства "вынуть" объект с его структурой,
то останутся места, которые занимали
элементы и связи данной системы и к которым так же применимы предельно общие
характеристики – протяженность, место, отграниченность.
Все эти места и потенциальные связи между
ними, которые занимали компоненты реальной системы, тоже можно рассматривать
как элементы некой виртуальной системы, описываемые с помощью наиболее общих
понятий – места и отношения.
Таким образом, пространство как таковое
можно рассматривать как некую структурированную совокупность "мест" и
отношений между ними. Каждое такое место уникально, и ему можно присвоить
индекс (имя), а связи (отношения), обозначить парами таких индексов.
В пространстве, описываемом евклидовой
геометрией, роль таких индексов играют наборы чисел – координат в выбранной
системе отсчёта. Но поскольку пространство изначально представляет собой
систему (и, возможно, не только виртуальную), то возможна и принципиально иная
индексация содержащихся в нём мест – системная. Она то и является естественной,
в отличие от евклидовой, в этом контексте
можно назвать условной. Такое
пространство можно определить как системное.
Но из этого следует, что и реальную
систему, если абстрагироваться от всех её конкретных свойств, можно описать
таким же способом. Такую систему можно определить как идеальную, а
пространство, которое она занимает, как системное
пространство. Таким образом, системное пространство – это отношения между
элементами системы, выраженные через наиболее общие характеристики пространства
(протяженность, место, отграниченность).
СИСТЕМНОЕ ПРОСТРАНСТВО ИДЕАЛЬНОЙ СИСТЕМЫ
Последовательность
наших рассуждений в процессе построения этой модели будет следующей.
Если рассматривать ту или иную систему, абстрагируясь от её
структуры, мы получим условно-атомарный, условно-бесструктурный объект, точку.
Изобразим его, нарисовав замкнутый
контур и отграниченную им часть поверхности закрасив.
рис. 1
Но из принципа системной организации
действительности следует, что любой объект должен иметь структуру, т. е.
состоять из каких-то частей, связанных между собой. В то же время он должен
быть частью какой-то большей системы, включающей этот объект в качестве
подсистемы (назовём её гиперсистемой).
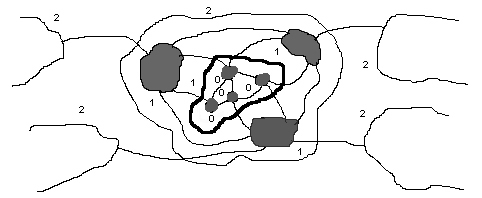
рис. 2
Как мы можем видеть, на этих рисунках чередуются
в определённом порядке всего два элемента: граница и пересекающая её связь.
Какую роль здесь играет граница? Это поверхность какого-то реального
физического тела, замыкающая в себе элементы этой системы, или нечто иное? Этот
вопрос порождает другой, более интересный: а что вообще есть граница между
телом и средой (при условии неограниченного действия принципа структурности
материи)? Это вопрос философского ранга и ответ на него не столь прост, каким
кажется поначалу. Чтобы не пускаться в обширные рассуждения, определим эту
границу как условность, приём, позволяющий выделить уровни организации системы.
Физический смысл этой границы (псевдограницы) – скачок свойств между системой и
окружением.
Снова обратимся к рисунку 2. На нём мы увидим
три типа границ, позволяющих увидеть три уровня иерархии рассматриваемой системы.
Четыре из них ограничивают небольшие заштрихованные области, обозначим их как границы
0-го уровня. У этих четырёх объектов есть одна общая граница (точнее –
псевдограница); обозначим её (и ещё три таких же) как границы 1-го уровня. Которые
ограничивают объекты 1-го уровня. В свою очередь, эти четыре объекта составляют
объект 2-го уровня (соответственно ограниченный границей 2-го уровня) и т. д. Этот
процесс можно продолжать долго (но применительно к реальной действительности
вряд ли кто-то сможет сказать, насколько долго). Ясно лишь, что самая
общая граница всегда совпадает с актуальной границей нашего познания.
Но можно двигаться и в противоположном
направлении. Объекты 0-го уровня – это тоже системы, которые, в свою очередь,
состоят из каких-то объектов, каждый из которых имеет псевдограницу -1-го
уровня, каждый из объектов -1-го уровня состоит из объектов -2-го уровня и так
далее.
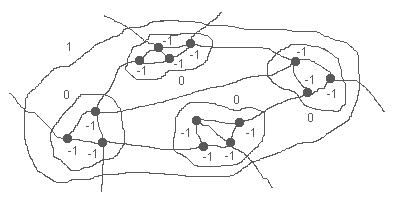
рис. 3
Таким образом, мы видим, что актуальной
становится проблема точки отсчёта для данного метода описания структуры
системы. Можно ли, например, выбрать её так, чтобы избавиться от отрицательных
индексов? Будем рассуждать так.
На любую систему Σ
можно смотреть двояко: "извне", как на
некую бесструктурную целостность, как на атомарный объект, атомарный элемент
какой-то другой системы (гиперсистемы), и "изнутри", когда возникает
необходимость рассмотреть внутреннее устройство системы, её структуру. В этом
случае нам придётся выделить следующие уровни организации системы Σ:
0-й уровень, когда система Σ рассматривается как атомарный
элемент гиперсистемы
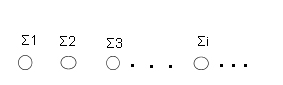
рис. 4
1-й уровень, который содержит основные векторы структуры системы Σ
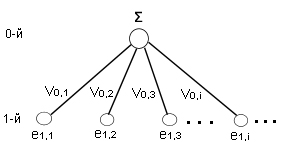
рис. 5
Каждый элемент 1-го уровня также имеет структуру, которую можно представить в виде
"дерева":
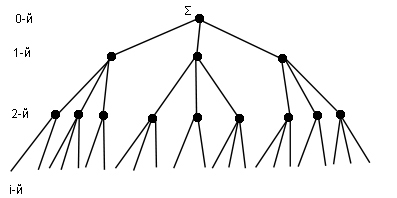
рис. 6
И так вплоть до уровня, который мы выбрали, как атомарный (α – уровень).
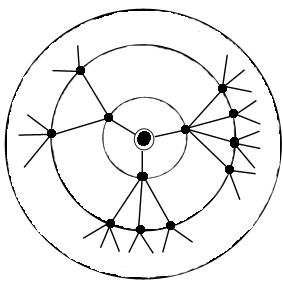
рис. 7
Та же иерархия, но в концентрической форме.
Но что же, всё-таки, есть система? Границы тела мы отвергли, определив их как
псевдосущности. Остаются только связи!
Да, есть ещё уровень атомов, но это тоже условность, эти объекты имеют
структуру, мы просто условились её не рассматривать. Но это подразумевает,
что наши "атомы" тоже сплошь состоят из связей, до какой бы
степени "дробления" мы не дошли. Но тогда в нашей системе, кроме
связей, ничего и не остаётся! Так ли это? Попробуем ответить на этот вопрос
немного позже, тогда, когда хотя бы немного определимся с тем, что есть
связи.
Любая связь имеет две, скажем так, ипостаси. Одна из этих ипостасей – физический
канал, другая – это то, что по нему движется (назовём его потоком ресурса).
Каков характер взаимодействия между этими двумя сущностями – потоком ресурса и
каналом? Здесь реализуется взаимодействие того рода, что канал определяет
характер ресурса и параметры потока ресурса. Тем самым, он выступает в роли
фактора, формирующего процесс движения потока ресурса и по
этой причине может рассматриваться как управленческий фактор, как
алгоритм (закон). Таким
образом, в явлении связи реализуется взаимодействие изменяемой (движение
потока ресурса) и изменяющей (канала) сущностей, т. е.
преобразование. В простейшем
случае его можно определить, как транспортное.
Что можно сказать о потоке ресурса? Поток в общем случае – это направленное
движение каких-то объектов, частиц. Если использовать понятия протяженности и
сечения, то поток – это сонаправленное движение
совокупности каких-то объектов, протяженность которой (размер в направлении
движения) больше, чем сечение (размер в направлении, перпендикулярном
движению). Из принятого определения потока также следует, что он имеет
дискретную структуру. Эта структура
может быть как очень простой (скажем, перемещение таких систем-атомов, как
жидкости, газы, сыпучие материалы), так и очень сложной (объектами потока могут
также быть различные физические, химические, технические системы).
Скажем,
аналоговый сигнал в линии связи может иметь очень сложную структуру. Более
того, в процессе преобразования любой объект (не только потоки
"атомарного" вещества или энергии, но и "твёрдые" системы)
можно рассматривать как поток ресурса, так как каждую такую систему необходимо
сначала доставить к узлам разборки (операция диссоциации), или же совокупность
компонентов доставить к узлам сборки системы (операция ассоциации).
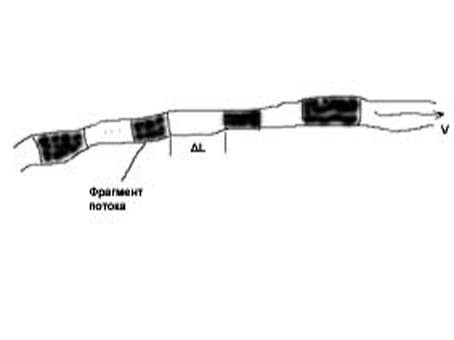
рис. 8
Ещё о потоке ресурса можно сказать, что он движется с какой-то скоростью (которая
может изменяться), а отдельные фрагменты потока как-то взаимодействуют между
собой, (существует какое-то расстояние между ними) и с поверхностью канала.
Потоки ресурса можно также классифицировать соответственно их природе
(вещественные, энергетические, информационные и т. д.). Канал можно
охарактеризовать по материалу, конфигурации (сечение, длина, топология),
оптимальному значению нагрузки.
Ещё одна важная характеристика потока – интенсивность (мощность). Это количество
ресурса, который проходит через сечение канала за единицу времени. Зависит от
скорости потока и наполнения канала (при выбранном сечении).
Какие
преобразования возможны над потоком ресурса? Все изменения в Природе, какими бы
многообразными они ни казались, сводятся всего к трём типам: диссоциации
(разборке), транспортировке (перемещению), и ассоциации (сборке). Изобразим это
следующим образом.
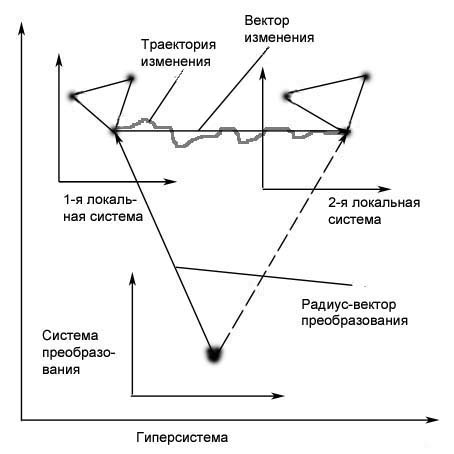
рис. 9
Напомним, что мы рассматриваем преобразование на структурном
пространстве. Введём некоторые соглашения относительно системных терминов.
Любую систему можно изобразить с помощью точек и линий. И то, и другое – суть
элементы системы. Но элементы-точки мы будем называть
узлами, а элементы-линии – связями.
Что такое – узлы, и какие действия можно выполнять над узлами системы?
Любой узел – это система, он всегда является подсистемой какой-то более сложной
системы. Если только он не объявлен
атомом, над ним можно производить основные действия. Скажем, узел можно
демонтировать, дезинтегрировать, разобрать полностью или частично, отключить от
связей. Или наоборот, осуществить сборку (интеграцию) узла или его модификацию,
подключить к связям. Ясно, что отключённый от связей узел можно
транспортировать в другую систему и подключить его там.
В составе преобразующей системы (а любая система в том или ином смысле
преобразователь) узел играет роль системоформирующего фактора в отношении
потока ресурса, проходящего через связи системы, с функциями
интеграции-дезинтеграции или изменения энергетического состояния элементов
потока (нагрева их или охлаждения). Узел
осуществляет взаимодействие потоков, а, следовательно, их взаимное
преобразование. В этом смысле весь наш мир можно рассматривать как одну
всеобъемлющую преобразующую (и преобразующуюся) систему, как
единый процесс преобразования.
Что можно в этом контексте сказать о связях? Связь – это тоже элемент системы,
который имеет свою структуру, он состоит из множества однородных
элементов, расположенных таким образом, чтобы была возможной
транспортировка потока ресурса (или воздействия) от одного узла к другому. Над
связями, как элементами системы, можно выполнять те же действия, что и над
узлами.
Если учесть вывод, к которому мы пришли ранее (что в
системе, по сути, нет ничего, кроме каналов и потоков по ним), то получится,
что манипуляции над узлами одновременно являются и манипуляциями над связями (а
любой поток ресурса – это элементы каких-то узлов в стадии преобразования, в
состоянии транспортировки). Основные характерные действия над связями – это
блокировка, деблокировка и перекоммутация каналов. Но возможны и другие
действия, как над каналами, так и над потоками ресурса. Можно менять
характеристики канала – сечение, длину, топологию. Поток ресурса можно
замедлить или ускорить, можно увеличить или уменьшить его интенсивность.
Так что же являет собой собственно система?
Вопрос этот весьма ёмкий и здесь дать полный ответ на него у нас не получится.
Но кое-что сказать всё же необходимо.
Система
– это рельеф, образованный каналами, матрица-алгоритм, который обеспечивает
протекание потоков ресурса и формирует их взаимодействие и преобразование, или
это поток ресурса? Вопрос этот более сложный, чем может показаться на первый
взгляд, а ответ на него следующий: система – это и то, и другое, потому что как
каналы влияют на поведение потока ресурса, так и поток ресурса формирует
рельеф, и это есть одно из проявлений развития. Ведь действительно, свойства
стали, в каком-то смысле, формируют структуру сталеплавильной печи и
металлообрабатывающего станка, а свойства нефти – структуру
нефтеперерабатывающего завода. Да, не непосредственно, а через преобразователь
– мышление человека (хотя можно утверждать, что само мышление человека
сформировано подобным образом). Но в рамках процесса деятельности с целеполаганием,
который осуществляет человек и для которого создаёт
предметы-посредники и процессы
посредники, мы договоримся считать систему каналов, рельеф, на котором
происходит преобразование ресурса, транспортное и структурное,
изменяющей сущностью, преобразователем,
алгоритмом, а поток ресурса – изменяемой
сущностью.
ПОРТРЕТ ИДЕАЛЬНОЙ СИСТЕМЫ
Теперь,
наконец, попробуем изобразить идеальную систему. Начнём с того, что изобразим
несвязанное множество объектов. Договоримся, что это атомы будущей системы, т.
е. внутренняя структура этих объектов нами рассматриваться не будет.
рис. 10
А потом соединим эти атомы связями. Мы получим атомарный уровень системы.
рис. 11
Но любая система организована иерархически, и в ней можно выделить уровни
организации. Покажем наглядно эту организацию, а для лучшего восприятия
обозначим псевдограницы подсистем разными цветами.
рис. 12
0 - это псевдограница гиперсистемы Σ0;
1,1 - соответствует Σ1
(предполагается, что на этом уровне есть ещё 1,2 (Σ2),
1,3 (Σ3)
и так далее…). В структуру системы 1,1 (или просто 1) входят пять
подсистем: 2,1; 2,2; 2,3; 2,4; 2,5. В структуру подсистемы 2,1
входят её подсистемы 3,1 и 3,2. В структуру подсистемы 2,2 входят
её подсистемы 3,3 и 3,4 (и так далее для всех подсистем 3-го уровня).
В структуру подсистемы 3,1 входят атомарные элементы 4,1 и 4,2.
В структуру подсистемы 3,2 входят атомарные элементы 4,3 и 4,4.
(Остальные структурные элементы системы индексируются по аналогии).
Таким образом, на 1-м уровне мы помещаем
всегда один объект – систему, структуру которой рассматриваем. Как видим, чтобы
обозначить элемент уровня, ему достаточно сопоставить две цифры: первая будет
обозначать уровень организации системы, вторая – номер узла на этом уровне. Но
вот чтобы зафиксировать координаты узла или связи
в системе, двух цифр недостаточно.
Наш рисунок (или аналогичный ему) можно сделать более наглядным, если представить
структуру системы в форме концентрической диаграммы.
рис. 13
Эта диаграмма отражает структуру системы, изображённой на предыдущем рисунке.
Разберёмся, как ею пользоваться.
Концентрические
окружности, включая центральный объект, означают уровни организации системы.
Отсчёт ведётся от центрального объекта, который символизирует систему в целом –
это 1-й уровень. Следующие по порядку окружности символизируют соответственно
2-й, 3-й и 4-й уровни системы. Каждая точка символизирует узел – место пересечения
каналов и взаимодействия потоков ресурсов. Каждая линия – группу связей,
или вектор. Узел и вектор і–го уровня может распадаться на группу
узлов и векторов і+1-го уровня. Но нам придётся немного модифицировать
систему обозначений.
На предыдущей схеме для обозначения каждого узла мы
использовали две цифры. Первая из них указывала на уровень организации системы,
к которому относится узел; вторая – "сквозной" номер объекта на этом
уровне. Уровень организации (концентрическая окружность) здесь символизирует
псевдограницу всех систем этого уровня, которые на этом уровне рассматриваются
как атомарные.
Узлы і-го уровня нумеруются последовательно, от 1 до n,
где n - число всех узлов і-уровня. Каждый узел і-1-го
уровня может распадаться на несколько узлов і-го уровня, а каждый узел
і-го уровня - на несколько узлов і+1-го уровня. Это означает,
что какой-то группе узлов і-го уровня можно поставить в соответствие
число - номер узла і-1-го уровня, а какой-то группе узлов
і+1-го уровня можно поставить в соответствие номер узла. И наоборот,
каждому узлу і-1-го уровня можно поставить в соответствие два числа,
ограничивающие диапазон номеров узлов і-го уровня, а каждому узлу і-го
уровня - диапазон номеров узлов і+1-го уровня, также заданный двумя
числами. Таким образом, получается, что структурные координаты любого узла
системы системы любой сложности всегда содержат 5 (пять) чисел.
- Z - зона, уровень организации системы или номер псевдограницы;
- E - узел, элемент і-го уровня;
- G - группа (сектор) і-го уровня или элемент і-1-го уровня; Диапазон номеров узлов і+1-го уровня, принадлежащих E - узлу і-го уровня;
- L - левая граница диапазона;
- R - правая граница диапазона.
U=U(Z,E,G,L,R).
Изобразим
структуру нашей системы ещё одним способом – в форме дерева. Так нам будет
легче продемонстрировать предложенную методику обозначений.
рис. 14
Структуру системы можно ещё описать при помощи числового ряда следующим образом.
Поставим возле каждого вектора i - го уровня число, которое будет означать число
векторов i+1 - го уровня, на которые он распадается. Запишем ряд:
1, 5, 2, 3, 2, 2, 2, 2, 2, 2, 3, 3,
2, 2, 2, 2, 4, 2;
Какая информация здесь содержится? Во-первых, этот ряд всегда начинается с числа 1,
что означает, что вектор уровня 0,1 распадается на пять векторов уровня 1,2,
а следующая за пятёркой группа из пяти чисел покажет, на сколько векторов уровня 2,3
распадётся каждый из пяти векторов уровня 1,2. Первое в этой пятёрке число 2.
Это означает, что следующая сразу за группой из пяти чисел пара чисел 2,2 показывает,
на сколько векторов уровня 3,4 распадётся каждый из первых двух векторов уровня 2,3
(на 2 и 2). Следующее в этой группе из пяти чисел число 3 означает, что
следующая сразу за пятёркой чисел + парой 2,2 показывает, на сколько векторов
уровня 3,4 распадётся каждый из следующих трёх векторов уровня 2,3 (на 2,
3 и 3) и т. д. Эта форма нам необходима будет для создания числового паспорта
системы.
Как
уже упоминалось выше, вторым основным элементом системы (кроме узла) является связь.
Связь это канал (или сумма каналов), по которым могут перемещаться потоки ресурса.
Поскольку конкретный поток ресурса имеет направление, его ещё можно определить как вектор.
Связь, которая объединяет несколько каналов, будем называть интегральной связью.
Псевдограницу
той или иной подсистемы пересекают каналы (группы каналов), которые связывают
её с другими подсистемами. Каждую такую группу будем называть пучком связей
(аналогично определим пучок векторов). Все группы связей той или иной
подсистемы образуют общую интегральную связь. Каждая общая интегральная
связь обязательно содержит противоположно направленные векторы.
Здесь
у нас возникает необходимость уточнить понятие вектора. Дело в том, что при ближайшем
рассмотрении появляется два разных типа векторов – вектор структуризации и
вектор-связь.
Что
такое "вектор структуризации" рассмотрим на конкретном примере.
В системе 1,1 можно выделить пять подсистем более низкого ранга: 2,1;
2,2; 2,3; 2,4; 2,5, каждая из которых тоже "дробится" на свои
подсистемы, подуровни. Поэтому каждая из подсистем, на которые "распадается"
1,1, являет собой как бы направление дифференциации, вектор
дифференциации, или, если рассматривать обратное направление – вектор структуризации.
Вектор дифференциации (структуризации) включает в себя все связи, объединяющие
элементы данной подсистемы (кроме тех, которые связывают основные подсистемы,
они принадлежат вектору 1,1).
Нечто иное представляет собой
вектор-связь. Сущность его следующая. Любая пара элементов системы
может быть связана между собой каналом взаимодействия. Его мы и называем
собственно связью. Но, поскольку по каналу осуществляется движение потока
ресурса – процесс направленный, то в этом контексте связь и можно определить как
вектор-связь.
В конечном счёте все связи системы соединяют элементы
атомарного уровня (α-элементы), хоть для этого им приходится
пересекать псевдограницы разных уровней разных подсистем. При этом количество
пересечений псевдограниц разных подсистем одного и того же уровня (ранга)
должно быть чётным!
Теперь об обозначениях. В развитие изложенного выше примем для обозначения связи
следующее выражение:
S=S(Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj)
а для обозначения вектора такое:
V=V(Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj)
Направление потока ресурса здесь примем от первой группы координат,
заключённых в скобки, ко второй группе координат в тех же скобках.
Пучок связей можно выразить как сумму составляющих его связей:
Sn=S(Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj)+
S(Zk,Ek,Gk,Lk,Rk;
Zl,El,Gl,Ll,Rl)+…+
S(Zm,Em,Gm,Lm,Rm;
Zn,En,Gn,Ln,Rn)
аналогично можно построить выражение для пучка векторов:
Vn=V(Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj)+
V(Zk,Ek,Gk,Lk,Rk;
Zl,El,Gl,Ll,Rl)+…+
V(Zm,Em,Gm,Lm,Rm;
Zn,En,Gn,Ln,Rn)
Но
всего сказанного выше недостаточно для создания полного формального портрета
системы. Дело здесь в том, что каждая система обладает набором свойств
(тождественным набору функций), осуществляет какое-то изменение окружения
посредством этих функций, каждая из которых характеризуется набором параметров.
Поэтому для полноты формальной картины системы нам необходимо описать её как
пространство изменений, пространство функцийи пространство свойств.
Эти пространства позволят дополнить статический портрет системы – динамическим,
их использование позволит показать систему как процесс.
По
сути, термины "свойство" и "функция" – синонимы. Свойство,
по определению, есть "сторона предмета, обусловливающая его различие
или сходство с другими предметами и проявляющаяся во взаимодействии с
ними". Базовый набор свойств системы определяет её качество,
уникальность. Но то или иное свойство системы может проявляться, а может не
проявляться в зависимости от обстоятельств. Если свойства системы не
проявляются, она бездействует, если проявляются – действует, функционирует.
Таким образом, то или иное свойство системы проявляется через соответствующую
её функцию, из чего мы можем сделать вывод, что функция – это активное
свойство системы.
Совокупность
свойств-функций системы – это те изменения, которые она может осуществлять над
потоком ресурса. Бывает, что преобразующих возможностей данной системы
(подсистемы некой системы) недостаточно, тогда поток ресурса (или
соответствующие его фрагменты) по каналам-связям отсылаются в другую систему
(подсистему этой же системы) которая осуществляет необходимое дополнительное воздействие.
Сумму таких воздействий можно назвать комплексным воздействием.
Следовательно,
взаимодействие между системами (точнее – содействие
систем) может осуществляться только с помощью связи, а его содержание
определяется изменениями характеристик потока ресурса. Отсюда видно, что сама
связь также является важнейшей функцией системы – транспортной функцией. Таким
образом, некий цикл функционирования системы заключается в том, что входной
канал приносит и заводит в систему поток ресурса до изменения, а выходной –
выводит и уносит поток ресурса после изменения. Сравнивая
входной и выходной потоки, мы можем обнаружить изменения, которые произошли
с ресурсом внутри системы (которая в этом случае играет роль "чёрного ящика".
А уже на основе этих изменений можно определить, вычислить
совокупность воздействий, функций, который данная система оказала на ресурс (а,
в конечном счёте, структуру "чёрного ящика"). Раскрывая
"чёрный ящик" (двигаясь внутрь структуры системы по её системному
пространству), мы можем определить, какому из узлов (подсистем того или иного
уровня) относится та или иная подгруппа функций.
таким образом, мы можем добраться до атомарного уровня системы, до уровня тех
её узлов, которые осуществляют элементарные воздействия (функции) на поток
ресурса.
Из
сказанного можно сделать вывод, что существует некое взаимно-однозначное
соответствие между структурным пространством системы в целом, структурой связей
этой системы и пространствами её функций и свойств. Дальше мы попытаемся
формализовать эти понятия.
Определим как внешние те связи системы,
которые пересекают её псевдограницу. Среди них будут как входные, так и
выходные каналы. Функции (активные свойства, соответствующие этим связям),
осуществляющие изменения потока ресурса на уровне псевдограницы системы, также
назовём её внешними функциями. Хотя, если говорить строго, чисто внешних
функций системы не существует, все воздействия системы на ресурс осуществляются
внутри, в рамках её псевдограниц. Хоть конкретное изменяющее воздействие на
ресурс осуществляется в узлах системы, любая связь, как мы уже договорились,
несёт функциональный смысл, переносит результат воздействия узла, как бы
проявляет какую-то функцию системы. А функцию, т. е. направленное действие,
можно изобразить как некий вектор. Обозначим его символом f, тогда
вектор --------->f есть некая функция системы Σ
Таких функций может быть от 0 до n. В этом случае полный
набор основных функций системы можно изобразить следующим образом:
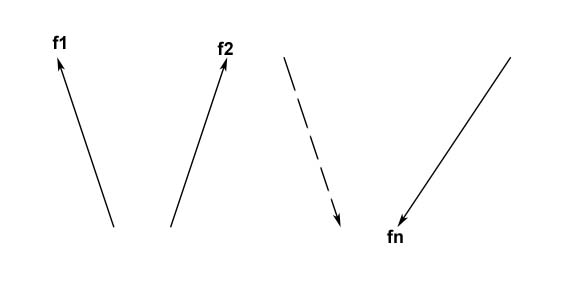
рис. 15
Из этих векторов можно построить базис, определив его как пространство функций
данной системы:
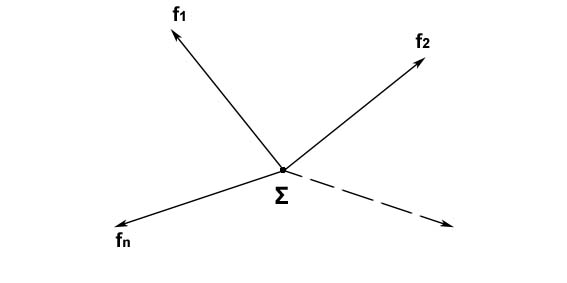
рис. 16
Существует
ли какое-то отличие между пространством свойств и пространством функций и если
да, то в чём оно заключается? Это отличие действительно существует, и суть его
такова, что свойство являет собой возможность,
потенциал, а функция – реализацию, акт. Канал без потока ресурса –
возможность, точно такой же возможностью является внешняя связь, если канал, скажем,
блокирован. Собственно функция появляется лишь в процессе взаимодействия
изменяемой и изменяющей сущностей.
Договоримся изображать свойство системы также вектором, но единичным,
тогда пространство свойств системы мы изобразим как единичный базис:
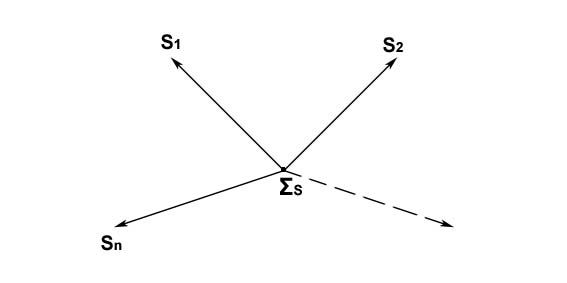
рис. 17
где Σs означает систему свойств, а векторы
S1,S2,…,Sn - отдельные свойства системы.
Каждое свойство системы может проявляться с меньшей или большей интенсивностью, от
нулевой (0), до максимальной (max) - [0,max]. Обозначим интенсивность
символом η, тогда функцию системы в каждый момент времени можно определить как
произведение её свойства на интенсивность: fi = Si * ηi,
а пространство функций можно изобразить следующим образом:
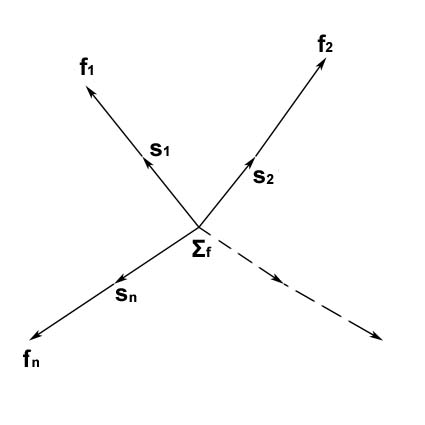
рис. 18
Присвоим уровню организации системы, на котором проявляются её
базисные функции, номер 1. Тогда на уровне с номером 0 будет проявляться
интегральное свойство системы – её назначение (или роль)
в гиперсистеме. Обозначим функцию,реализующую интегральное свойство системы
Σ греческим символом Ρ (ро), что будет обозначать роль.
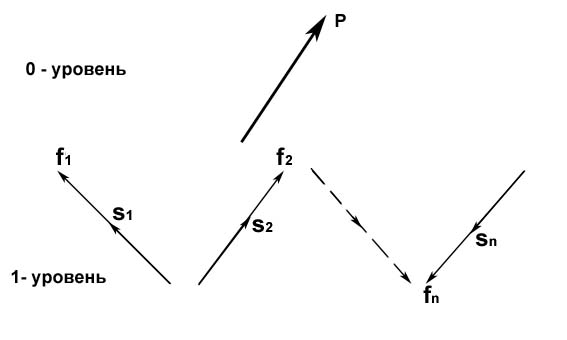
рис. 19
Тогда вектор Ρ есть не что иное, как векторная сумма базисных функций системы:
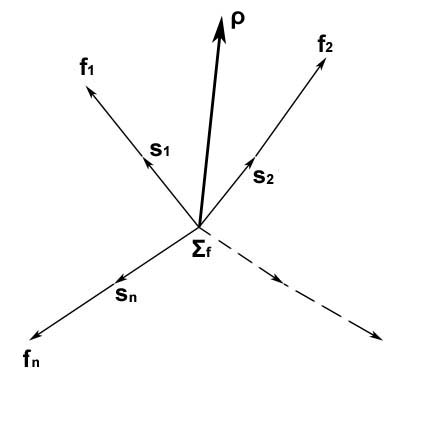
рис. 20
При изменениях интенсивностей проявление свойств
S1, S2, …, Sn системы Σ будет
изменяться и её интегральная функция. Конец изображающего эту функцию вектора Ρ
будет описывать при этом некоторую кривую в пространстве свойств-функций системы.
Итак, Ρ есть интегральная функция системы Σ. Но каждый элемент этой системы тоже
система, а, следовательно, обладает своим набором базовых функций и своей ролью в
материнской системе. При этом между функциями соседних уровней существует следующая
связь.
Функции 1-го уровня порождают роль системы (функцию 0-уровня). Набор функций
2-го уровня порождает свои интегральные функции - ими как раз и являются функции
1-го уровня. То же самое по отношению к наборам функций 2-го уровня делают группы
наборов функций 3-го уровня и т. д. вглубь системы, вплоть до уровня, определённого
как атомарный. Наглядно изобразить эту зависимость можно следующим образом:
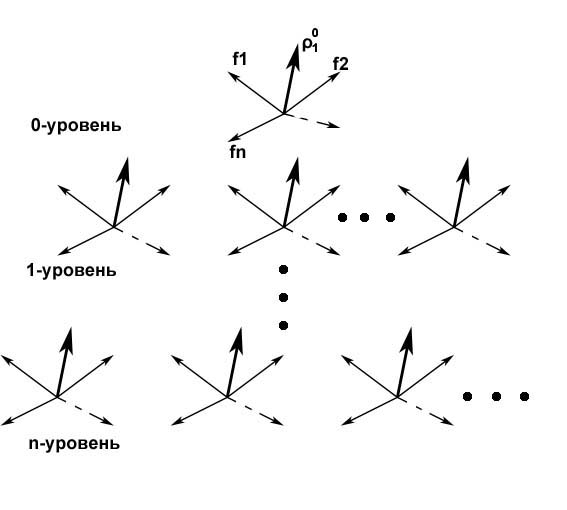
рис. 21
Для
описания пространства свойств-функций системы используем тот же формальный
аппарат, что и для описания её структурного пространства. Основное отличие
будет заключаться в замене главного объекта описания. В структурном
пространстве это был узел, в пространстве свойств-функций это будет функция (и
то, что с ней связано – свойство, связь, канал, вектор, поток ресурса).
Вектор
в структурном пространстве системы указывает направление диссоциации
("разукрупнения") узлов, а ещё являет интегральный образ связи, т. е.
он как бы суммирует все связи – и
входные, и выходные, которые коммутируют узел с его окружением.
Возьмём
ту же концентрическую диаграмму, которую мы использовали для изображения
структурного пространства системы, но каждый из векторов диссоциации заменим
на противоположный. В функциональном пространстве эти векторы
мы обозначим как ρ-векторы – т. е. роли узлов в системе.
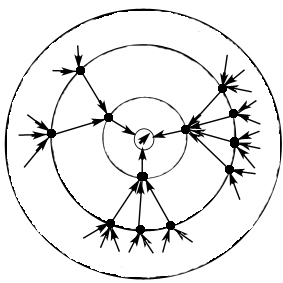
рис. 22
Из этой схемы (а особенно из предыдущего рисунка, где изображена ролевая иерархия)
видно, что группы ролевых векторов (интегральных функций) i+1-го уровня составляют
базисы для ролевых векторов i-го уровня, а такие же группы векторов i-го уровня -
базисы для интегральных функций i-1-го уровня. Возьмём координатную формулу для
обозначения узла и запишем её для ρ-вектора:
Ρ = Ρ(Z,E,G,L,R);
Здесь индексы выполняют то же самое назначение, что и в формуле для узла. Так, Z
(зона, ранг) обозначает уровень организации системы, значения Z отсчитываются
как и в структурном пространстве, т. е. от уровня системы как целого до её атомарного
уровня. E означает номер интегральной функции на уровне i. G означает
группу функций (базис) на уровне i или номер порождаемой этим базисом
роли на уровне i-1. L и R означают левую и правую границу
диапазона номеров группы функций (базиса) на уровне i+1, порождающего роль
с номером E на уровне i.
Но ролевой вектор, как и любой вектор, имеет начало и конец. В предыдущей формуле он
описывался через координаты начала. Но любая интегральная функция связывает два уровня
системы, а начало и конец вектора, изображающего эту функцию,
описывается двумя наборами координат:
Ρ = Ρ(Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj)
Интегральная функция - понятие относительное. Интегральной функцией мы называем всю
совокупность воздействий, осуществляемых системой, т. е., её подсистемами внутри
псевдограницы, связывая это суммарное воздействие с совокупностью активных каналов,
пересекающих псевдограницу системы. Но конкретная связь-функция может пересечь не
одну псевдограницу и связать элементы одного уровня разных подсистем.
рис. 23
Используем для её обозначения формулу:
F = F (Zi,Ei,Gi,Li,Ri;
Zj,Ej,Gj,Lj,Rj;K)
где K - номер канала, пересекающего псевдограницу системы.
Пожалуй,
это всё, что нам нужно было сказать о системе ввиду поставленной задачи
(универсального автоматического проектирования). Мы ввели структурное и
функциональное пространства для того, чтобы обнажить сущность преобразования,
как такового и найти универсальный способ его описания. Только располагая таким
способом, мы можем надеяться построить универсальный алгоритм проектирования
систем с заданными свойствами.
Мы
уже упоминали, что все системы, которые проектирует и изготавливает человек,
являются для него инструментом воздействия на окружение, а функции этого
инструмента являются производной от характера, структуры этого воздействия.
Само
преобразование, как мы уже видели, сводится к совокупности очень простых
действий. Тот или иной элемент системы либо удаляются из системы, либо
добавляется в её структуру новый элемент, либо заменяется существующий элемент на
тождественный, новый, или изменяются координаты элемента в структурном
пространстве системы – происходит его перекоммутация. Но что, если этот элемент
– атомарный, и физически скрыт в недрах системы, на самом глубоком уровне её структуры?
Чтобы добраться до него, необходимо произвести полную или частичную диссоциацию
системы на составляющие компоненты, а после выполнения задачи преобразования
провести обратную операцию – сборку системы в новую целостность.
Исходя
из этого, все функции преобразователя можно условно разбить на 5 групп:
1.Сближение, совмещение изменяющего и изменяемого, ресурса и
преобразователя (транспортная функция, входной поток).
2.Диссоциация системы на элементы на заданную глубину
(аналитическая, или дезинтеграционная функция).
3.Собственно преобразование (структурно-преобразующая функция).
4.Ассоциация системы в узлы (синтетическая, или интегрирующая функция).
5.Разъединение, разведение изменяющего и изменённого, ресурса
и преобразователя (транспортная функция, выходной поток).
Конечно,
универсальный алгоритм должен выполнять и другие функции (скажем, образование и
использование системы буферов для промежуточного хранения тех или иных
компонентов системы), но названные пять функций присутствуют в любом алгоритме
полного преобразования. Хоть бывают виды преобразований, где отдельные функции
(из средней тройки) не нужны. Например, если решается задача диссоциации
(разборки) системы, не нужны функции 3 и 4, задача ассоциации системы из
элементов делает ненужными функции 2 и 3, а решение задачи чисто
транспортного преобразования исключает и 2, и 3, и 4-ю функции.
В функции алгоритма может входить также не изменяющее структуры (скажем, деформирующее
геометрическое) преобразование атомов системы (например, растяжение элемента по осям
X,Y или Z). Изобразить полный процесс преобразования можно при помощи следующей схемы:
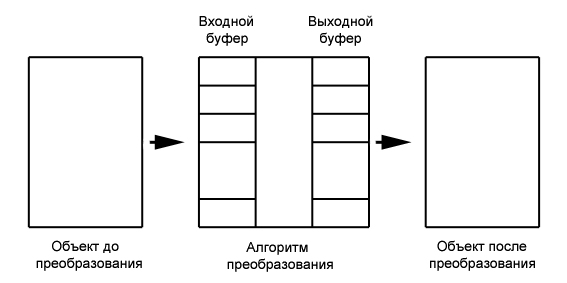
рис. 24
Теперь
попробуем перевести наши рассуждения на язык, который бы мог воспринять
компьютер. Иными словами, мы должны построить корректную структуру данных.
Как
уже упоминалось выше, в качестве исходной информации для нашего алгоритма
достаточно описания двух крайних состояний изменяемой системы – до изменения и
после него. Но в нашем подходе это структура больше, чем просто структура
данных – она играет ещё и роль задания. Это описание должно иметь следующую
форму.
Задание
представляет собой таблицу, состоящую из двух однотипных частей. В первой её
половине закодирована структура ресурса до изменения, во второй – его структура
после изменения. Каждая из таких подтаблиц представляет собой не что иное, как
структурное пространство системы-ресурса, каждый элемент которой представлен не
только структурными координатами, но и конструкторско-технологическими
характеристиками.
У этой конструкции есть одна особенность – ни один из её элементов (почти ни
один) не имеет фиксированной длины. Это предпринимается для того, чтобы не
накладывать заранее ограничений на структурную глубину системы – в принципе,
она может быть столь угодно сложной. Для того чтобы
обеспечить точную адресацию каждого элемента этой записи, вводится система
внутренних адресов. Её функция заключается в том, чтобы предварить каждый блок
однотипных элементов, имеющих различную длину, такими адресами, каждый из
которых адресовал бы очередной элемент этого блока. Основные фрагменты этой
записи следующие:
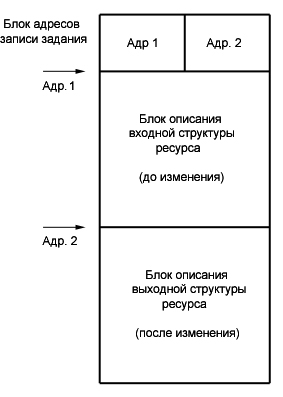
рис. 25
В принципе Адр. 1 представляет собой
константу и можно не тратить под него место. Адреса отсчитываются от начала
записи, т. о. начало записи имеет внутренний адрес 0.
БЛОК ОПИСАНИЯ ВХОДНОЙ СТРУКТУРЫ
| Адреса основных групп элементов блока | Адрес числового шифра | Адрес блока узлов | Адрес блока связей |
| Блок шифра | Числовой шифр структуры ресурса |
| Блок узлов | Адрес уровня 1 | Адрес уровня 2 | ... | Адрес уровня A |
| Уровень1 | Адрес узла 1 | Адрес узла 2 | ... | Адрес узла B |
| Узел 1 | Структурные координаты | Конструкторско-технологические характеристики |
| Узел 2 | ----//---- | ----//---- |
| ... | ... |
| Узел B | ----//---- | ----//---- |
| Уровень 2 | Адрес узла 1 | Адрес узла 2 | ... | Адрес узла C |
| Узел 1 | ----//---- | ----//---- |
| Узел 2 | ----//---- | ----//---- |
| ... | ... |
| Узел C | ----//---- | ----//---- |
| ... | ... |
| Уровень A | Адрес узла 1 | Адрес узла 2 | ... | Адрес узла D |
| Узел 1 | ----//---- | ----//---- |
| Узел 2 | ----//---- | ----//---- |
| ... | ... |
| Узел D | ----//---- | ----//---- |
| Блок связей | Адрес связи 1 | Адрес связи 2 | ... | Адрес связи E |
| Связь1 | Структурные координаты | Конструкторско-технологические характеристики |
| Связь 2 | ----//---- | ----//---- |
| ... | ... |
| Связь E | ----//---- | ----//---- |
рис. 26
Отметим,
что блок описания выходной структуры имеет аналогичную конструкцию.
Формированием
записи задания заканчивается этап постановки задачи и с ним участие человека в
процессе проектирования системы. Всю дальнейшую работу должен выполнять
"Демиург". Обозначим ключевые моменты логики "Демиурга" и
те структуры данных, на которых она построена.
Цикл
работы алгоритма "Демиург" должен состоять из следующих этапов. Самым
первым этапом его работы является формирование записи задания. После того, как
такая запись получена, начинается её анализ. Цель такого анализа –
сконструировать пространство изменений
ресурса. Процедура анализа будет заключаться в сравнении двух основных частей
задания. Первыми должны сравниваться числовые шифры системы до, и после
изменения (эти шифры и их смысл описаны выше). Сравнение этих структур будет
отличаться тем, что станет осуществляться с одновременным поиском в базе данных
(следовательно, предварительно должна быть произведена настройка на
соответствующую базу данных). В чём смысл этой структуры?
Числовой
шифр – это как бы одномерный эквивалент структуры системы. Сравнение числовых
шифров позволит определить, осуществлялось ли структурное преобразование
системы. Но это ещё не всё. Суть используемого нами метода, как мы помним,
заключается в утверждении, что в структуре преобразования неявным
образом содержится структура преобразователя. Особенность баз данных
"Демиурга" в том, что структура записи такой базы тождественна
структуре задания. Т. е. объект в такой базе данных представлен не собственной
структурой, но структурой
осуществляемого им изменения. Таким образом, сравнивая числовые шифры
задания с шифрами объектов базы данных, мы сможем быстро определить, не
существует ли аналогичный или близкий к проектируемому
объекту прототип в базе данных, что позволит отменить задачу проектирования
или заменить её задачей адаптации.
Этот же способ будет применяться для поиска отдельных узлов проектируемой
системы в базах данных. Какими должны быть действия алгоритма после окончания
поиска в базах данных и подтверждения задачи проектирования?
В этом случае алгоритм начинает строить пространство
изменений. Как это происходит и в какой форме фиксируется результат?
Основная
информация, которую содержит задание – это числовой шифр (структурный код)
системы, а также описание её узлов и связей. Описание
узла содержит следующие поля:
| 1 | 2 | 3 | 4 |
| Структурные координаты | Собственное имя (назначение) | Структурно-функциональные параметры (кол-во входов, выходов, их хар-ки) | Конструктивно-технологические параметры (размеры, крепления, геометрические координаты, цвет, запах и т. п.) |
рис. 27
а описание связи может состоять из следующих полей:
| 1 | 2 | 3 | 4 |
| Структурные координаты начала (выход из узла) | Структурные координаты конца (вход в узел) | Структурно - функциональные параметры (род ресурса, интенсивность потока, периодичность, назначение и т. п.) | Конструктивно - технологические параметры (материал, конфигурация, технология, режимы) |
рис. 28
Элементарное
изменение заключается в изменении любого из полей описания или их совокупности;
например, для узла:
| 1 | 2 | 3 | 4 |
| Структурныекоординаты 1 | "Имя" | С - Ф параметры | К -Т параметры |
|
|
V
| 1 | 2 | 3 | 4 |
| Структурныекоординаты 2 | "Имя" | С - Ф параметры | К -Т параметры |
рис. 29
означает, что изменились структурные координаты узла "имя".
Аналогично понимается изменение в описании связи. Каким образом можно строго
описать изменение?
Чтобы
ответить на этот вопрос, нужно определиться, к чему сводятся (в чём
проявляются) результаты любого
изменения системы. А сводятся все изменения к тому, что в системе либо исчезают
какие-либо узлы и связи, которые там наличествовали прежде, либо появляются
новые узлы и связи, которых в системе прежде не было, либо узлы и связи системы
меняют своё местоположение в пространстве системы. А больше ничего не происходит
при преобразовании системы.
Введём
понятие виртуального структурного
пространства, элементами которого являются виртуальные узлы и виртуальные
связи. Структурное пространство реальной системы совпадает с некоторыми
элементами системы виртуальной. Если теперь совместить с виртуальным
пространством структурные пространства системы до и после её изменения, то
изменение можно описать, как вектор, начало и конец которого описываются своим
набором параметров. Такие наборы параметров – это фрагменты записи задания, т.
е. соответствующие описания узлов и связей (или их поля). Т. о, вектор
изменения может не выходить за пределы поля записи или пространства системы в
целом. Но любой вектор изменения, выходящий за пределы пространства системы связан
с изменяемой системой либо своим началом, либо концом. Другой его компонент в
этом случае связан со средой (скажем, базой данных).
Таким
образом, элементарный вектор изменения – это пара однородных фрагментов
задания, один из которых принадлежит описанию системы (или системы и базы) до
изменения, другой – описанию её (или их) после изменения.
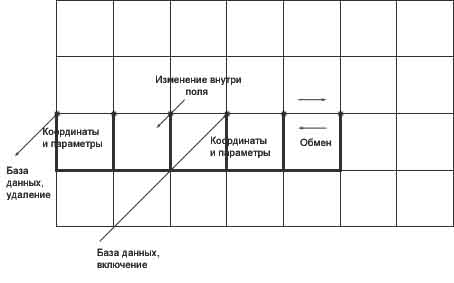
рис. 30
| Узел "имя" (старые координаты) |
|
V
| Узел "имя" (новые координаты) |
рис. 31
| Узел "имя" |
|
V
| База |
рис. 32
| База |
|
V
| Узел "имя" |
рис. 33
| Поле |
|
V
| Поле |
рис. 34
Но вот мы собрали систему изменений и
поместили её в виде совокупности бинарных таблиц (или пар координат элементов)
в файл изменений. Что дальше? Дальше, видимо, нам необходимо на основе полученной
системы изменений построить систему функций будущего преобразователя.
Функция
– это действие фактора, осуществляющего изменение. Между изменением и
действием, его осуществляющим, существует взаимнооднозначное соответствие. Как
его сформулировать в рамках принятого подхода? Наверное, это можно сделать при
помощи таблицы соответствий "изменение-функция". Как? Набор основных
функций, как мы уже выяснили выше, ограничен. В принципе, типичное изменение
сводится к тому, что объект изымается из одной локальной подсистемы,
транспортируется и включается в другую локальную подсистему. Какие действия
осуществляются при этом? Необходимо осуществить функцию поиска объекта,
определить место его новой дислокации, надо разрушать старые связи объекта и
создавать новые, а также обеспечивать временные связи при транспортировке. Вот,
пожалуй, и всё. Но это если говорить о связях и объектах в общем, идеальном
плане. Однако реальные связи и объекты (узлы) системы чрезвычайно многолики, а
это требует большого разнообразия элементарных функций для осуществления
изменений над ними. Вот для определения такого рода конкретных функций и нужны
таблицы соответствия. Эти функции должны определяться на основании не только
структурных, но и конструктивных особенностей узлов и связей.
Дальше
должна следовать сборка интегральных функций, оптимизация (только по одной
нужной функции) и далее – синтез функциональных узлов. После этого – подбор их
в базе данных.
| Универсальный код функции | Специальный код функции | Параметры |
рис. 35
г. Запорожье, 1993 г.
|
|
|
| ГЛАВНАЯ | ПРЕДИСЛОВИЕ | СОДЕРЖАНИЕ | РАЗДЕЛЫ | СТАТЬИ | КОНТАКТЫ |
Приложения
|